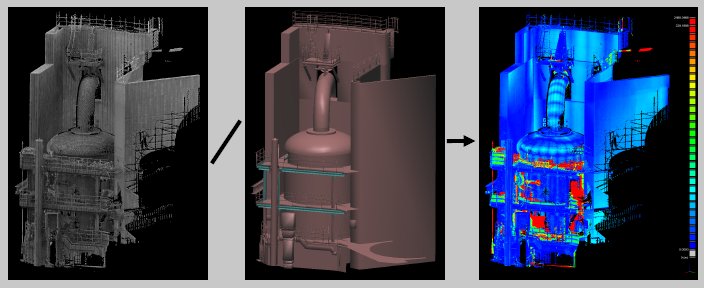
Cloud / mesh distances computation
CloudCompare is a 3D point cloud (and triangular mesh) processing software. It has been originally designed to perform comparison between two dense 3D points clouds (such as the ones acquired with a laser scanner) or between a point cloud and a triangular mesh. It relies on a specific octree structure dedicated to this task. Afterwards, it has been extended to a more generic point cloud processing software, including many advanced algorithms (registration, resampling, color/normal/scalar fields handling, statistics computation, sensor management, interactive or automatic segmentation, display enhancement, etc.).
Cloud / mesh distances computation
CloudCompare relies on Qt and OpenGL.
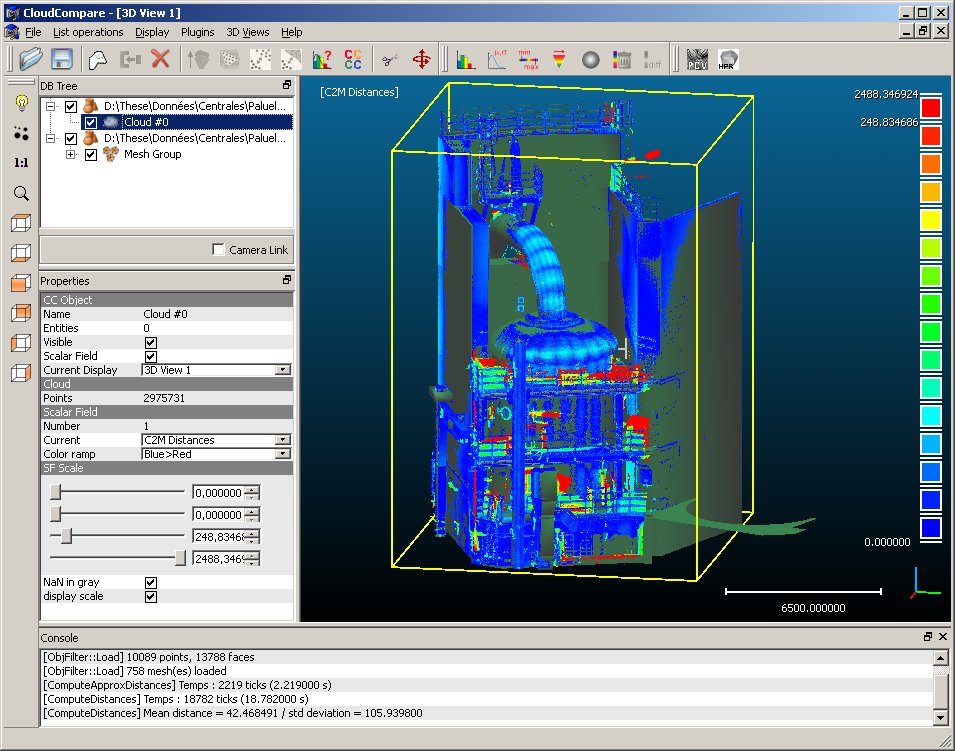
User interface snapshot
Thanks to Eugene Liscio (www.ai2-3d.com), here is a first introductory tutorial video:
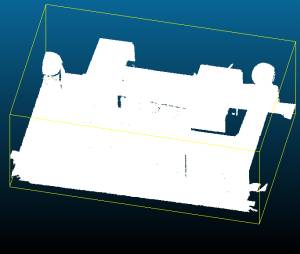
Ambient occlusion of a raw point cloud with the qPCV plugin
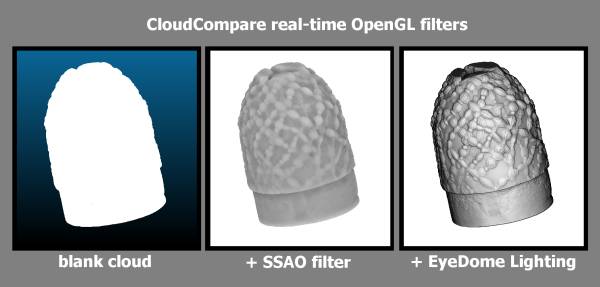
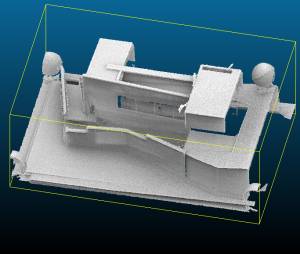
Example of real-time GL filters applied on raw point clouds