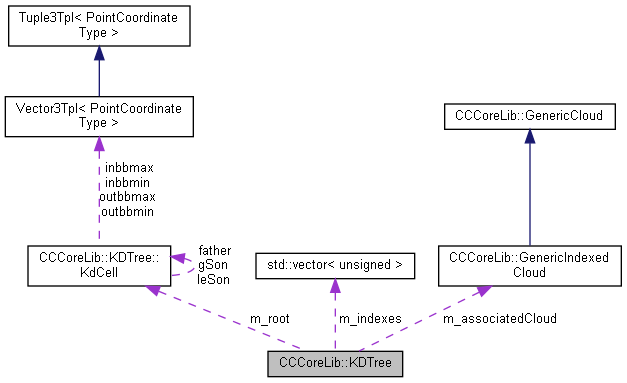
A Kd Tree Class which implements functions related to point to point distance.
More...
#include <KdTree.h>
|
| KdCell * | buildSubTree (unsigned first, unsigned last, KdCell *father, unsigned &nbBuildCell, GenericProgressCallback *progressCb=nullptr) |
| | Builds a sub tree. More...
|
| |
|
void | deleteSubTree (KdCell *cell) |
| | Deletes a sub tree.
|
| |
|
void | updateInsideBoundingBox (KdCell *cell) |
| | Computes a cell inside bounding box using the sons ones. The sons bounding boxes have to be up to date considering the points they contain.
|
| |
|
void | updateOutsideBoundingBox (KdCell *cell) |
| | Computes a cell outside bounding box using the father one and the cutting plane.
|
| |
| ScalarType | pointToCellSquareDistance (const PointCoordinateType *queryPoint, KdCell *cell) |
| | Computes the distance between a point and a cell inside bounding box. More...
|
| |
| ScalarType | InsidePointToCellDistance (const PointCoordinateType *queryPoint, KdCell *cell) |
| | Computes the distance between a point and the outside bounding box of the cell in which it lies. More...
|
| |
| void | pointToCellDistances (const PointCoordinateType *queryPoint, KdCell *cell, ScalarType &min, ScalarType &max) |
| | Computes the distances (min & max) between a point and a cell inside bounding box. More...
|
| |
| int | checkNearerPointInSubTree (const PointCoordinateType *queryPoint, ScalarType &maxSqrDist, KdCell *cell) |
| | Checks if there is a point in KdCell that is less than minDist-apart from the query point, starting from cell cell. More...
|
| |
| bool | checkDistantPointInSubTree (const PointCoordinateType *queryPoint, ScalarType &maxSqrDist, KdCell *cell) |
| | Checks if there is a point in KdCell that is less than minDist-apart from the query point, starting from cell cell. More...
|
| |
| void | distanceScanTree (const PointCoordinateType *queryPoint, ScalarType distance, ScalarType tolerance, KdCell *cell, std::vector< unsigned > &localArray) |
| | Recursive function which store every point lying to a given distance from the query point. More...
|
| |
|
|
KdCell * | m_root |
| | Tree root.
|
| |
|
std::vector< unsigned > | m_indexes |
| | Point indexes.
|
| |
|
GenericIndexedCloud * | m_associatedCloud |
| | Associated cloud.
|
| |
|
unsigned | m_cellCount |
| | Number of cells.
|
| |
A Kd Tree Class which implements functions related to point to point distance.
◆ buildFromCloud()
Builds the KD-tree.
- Parameters
-
| cloud | the point cloud from which to buil the KDtree |
| progressCb | the client method can get some notification of the process progress through this callback mechanism (see GenericProgressCallback) |
- Returns
- success
◆ buildSubTree()
Builds a sub tree.
- Parameters
-
| first | first index |
| last | last index |
| father | father cell |
| nbBuildCell | nbBuildCell |
| progressCb | the client method can get some notification of the process progress through this callback mechanism (see GenericProgressCallback) |
- Returns
- sub tree (cell)
◆ checkDistantPointInSubTree()
| bool KDTree::checkDistantPointInSubTree |
( |
const PointCoordinateType * |
queryPoint, |
|
|
ScalarType & |
maxSqrDist, |
|
|
KdCell * |
cell |
|
) |
| |
|
protected |
Checks if there is a point in KdCell that is less than minDist-apart from the query point, starting from cell cell.
Optimiszed version of CheckNearerPointInSubTree since we don't want to find the nearest point, but only check if there is a point that is close enough
- Parameters
-
| queryPoint | the query Point coordinates |
| maxSqrDist | square of the maximal distance from querypoint |
| cell | kdtree-cell from which to start the research |
- Returns
- true if there is a point in the subtree starting at cell that is close enough from the query point
◆ checkNearerPointInSubTree()
| int KDTree::checkNearerPointInSubTree |
( |
const PointCoordinateType * |
queryPoint, |
|
|
ScalarType & |
maxSqrDist, |
|
|
KdCell * |
cell |
|
) |
| |
|
protected |
Checks if there is a point in KdCell that is less than minDist-apart from the query point, starting from cell cell.
- Parameters
-
| queryPoint | the query Point coordinates |
| maxSqrDist | square of the maximal distance from querypoint |
| cell | kdtree-cell from which to start the research |
- Returns
- -1 if there is no nearer point from querypoint. The nearest point index found in cell if there is one that is at most maxdist apart from querypoint
◆ distanceScanTree()
| void KDTree::distanceScanTree |
( |
const PointCoordinateType * |
queryPoint, |
|
|
ScalarType |
distance, |
|
|
ScalarType |
tolerance, |
|
|
KdCell * |
cell, |
|
|
std::vector< unsigned > & |
localArray |
|
) |
| |
|
protected |
Recursive function which store every point lying to a given distance from the query point.
- Parameters
-
| queryPoint | the query point coordinates |
| distance | the wished distance from the query point |
| tolerance | tolerance for resulting points : p is in resulting array if ||p-queryPoint||<=tolerance |
| cell | current cell to explore (used for recursion) |
| [out] | localArray | output of the algorithm. Resulting points m_indexes in associatedCloud are stored in this array |
◆ findNearestNeighbour()
| bool KDTree::findNearestNeighbour |
( |
const PointCoordinateType * |
queryPoint, |
|
|
unsigned & |
nearestPointIndex, |
|
|
ScalarType |
maxDist |
|
) |
| |
Nearest point search.
- Parameters
-
| queryPoint | coordinates of the query point from which we want the nearest point in the tree |
| nearestPointIndex | [out] index of the point that lies the nearest from query Point. Corresponding coordinates can be retrieved using getAssociatedCloud()->getPoint(nearestPointIndex) |
| maxDist | distance above which the function doesn't consider points |
- Returns
- true if it finds a point p such that ||p-queryPoint||<=maxDist. False otherwise
◆ findPointBelowDistance()
| bool KDTree::findPointBelowDistance |
( |
const PointCoordinateType * |
queryPoint, |
|
|
ScalarType |
maxDist |
|
) |
| |
Optimized version of nearest point search method.
Only checks if there is a point p into the tree such that ||p-queryPoint||<=maxDist (see FindNearestNeighbour())
◆ findPointsLyingToDistance()
| unsigned KDTree::findPointsLyingToDistance |
( |
const PointCoordinateType * |
queryPoint, |
|
|
ScalarType |
distance, |
|
|
ScalarType |
tolerance, |
|
|
std::vector< unsigned > & |
points |
|
) |
| |
Searches for the points that lie to a given distance (up to a tolerance) from a query point.
- Parameters
-
| queryPoint | query point coordinates |
| distance | distance wished between the query point and resulting points |
| tolerance | error allowed by the function : each resulting point p is such that distance-tolerance<=||p-queryPoint||<=distance+tolerance |
| points | [out] array of point m_indexes. Each point stored in this array lie to distance (up to tolerance) from queryPoint |
- Returns
- the number of matching points
◆ getAssociatedCloud()
Gets the point cloud from which the tree has been build.
- Returns
- associated cloud
◆ InsidePointToCellDistance()
| ScalarType KDTree::InsidePointToCellDistance |
( |
const PointCoordinateType * |
queryPoint, |
|
|
KdCell * |
cell |
|
) |
| |
|
protected |
Computes the distance between a point and the outside bounding box of the cell in which it lies.
- Parameters
-
| queryPoint | the query point coordinates |
| cell | the cell containting the query point |
- Returns
- the distance between the point and the cell border. If this value is negative, it means that the cell has no border.
◆ pointToCellDistances()
| void KDTree::pointToCellDistances |
( |
const PointCoordinateType * |
queryPoint, |
|
|
KdCell * |
cell, |
|
|
ScalarType & |
min, |
|
|
ScalarType & |
max |
|
) |
| |
|
protected |
Computes the distances (min & max) between a point and a cell inside bounding box.
- Parameters
-
| queryPoint | the query point coordinates |
| cell | the cell from which we want to compute the distance |
| min | [out] the minimal distance between the query point and the inside bounding box of cell |
| max | [out] the maximal distance between the query point and the inside bounding box of cell |
◆ pointToCellSquareDistance()
| ScalarType KDTree::pointToCellSquareDistance |
( |
const PointCoordinateType * |
queryPoint, |
|
|
KdCell * |
cell |
|
) |
| |
|
protected |
Computes the distance between a point and a cell inside bounding box.
- Parameters
-
| queryPoint | queryPoint coordinates |
| cell | the cell from which we want to compute the distance |
- Returns
- 0 if the point is inside the cell, the suare of the distance between the two elements if the point is outside
The documentation for this class was generated from the following files: