|
qCC_db version 2.13.alpha (Qt) - 31 May 2022
CloudCompare 3D entities
|
|
qCC_db version 2.13.alpha (Qt) - 31 May 2022
CloudCompare 3D entities
|
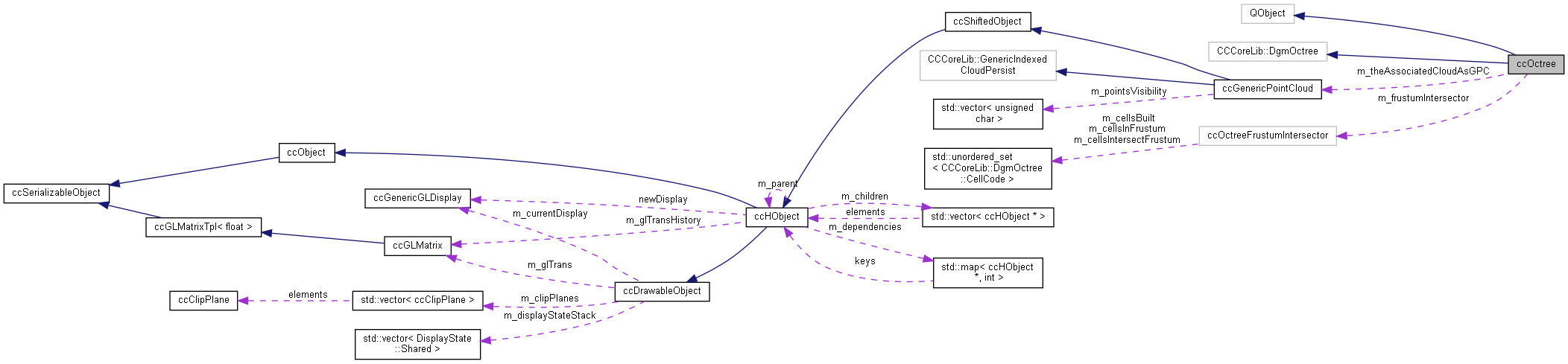
Octree structure. More...
#include <ccOctree.h>
Classes | |
| struct | BestRadiusParams |
| Parameters for the GuessBestRadius method. More... | |
Public Types | |
| enum | DisplayMode { WIRE = 0 , MEAN_POINTS = 1 , MEAN_CUBES = 2 } |
| Octree displaying methods. More... | |
| typedef QSharedPointer< ccOctree > | Shared |
| Shared pointer. | |
Signals | |
| void | updated () |
| Signal sent when the octree organization is modified (cleared, etc.) | |
Public Member Functions | |
| ccOctree (ccGenericPointCloud *cloud) | |
| Default constructor. More... | |
| virtual | ~ccOctree () |
| Destructor. | |
| void | multiplyBoundingBox (const PointCoordinateType multFactor) |
| Multiplies the bounding-box of the octree. More... | |
| void | translateBoundingBox (const CCVector3 &T) |
| Translates the bounding-box of the octree. More... | |
| ccBBox | getSquareBB () const |
| Returns the octree (square) bounding-box. | |
| ccBBox | getPointsBB () const |
| Returns the points bounding-box. | |
| virtual void | clear () override |
| int | getDisplayedLevel () const |
| Returns the currently displayed octree level. | |
| void | setDisplayedLevel (int level) |
| Sets the currently displayed octree level. | |
| DisplayMode | getDisplayMode () const |
| Returns the currently display mode. | |
| void | setDisplayMode (DisplayMode mode) |
| Sets the currently display mode. | |
| void | draw (CC_DRAW_CONTEXT &context) |
| Draws the octree. | |
| bool | intersectWithFrustum (ccCameraSensor *sensor, std::vector< unsigned > &inCameraFrustum) |
| Intersects octree with a camera sensor. | |
| bool | pointPicking (const CCVector2d &clickPos, const ccGLCameraParameters &camera, PointDescriptor &output, double pickWidth_pix=3.0) const |
| Octree-driven point picking algorithm. | |
Static Public Member Functions | |
| static void | ComputeAverageColor (CCCoreLib::ReferenceCloud *subset, ccGenericPointCloud *sourceCloud, ColorCompType meanCol[]) |
| Computes the average color of a set of points. | |
| static CCVector3 | ComputeAverageNorm (CCCoreLib::ReferenceCloud *subset, ccGenericPointCloud *sourceCloud) |
| Computes the average normal of a set of points. | |
| static PointCoordinateType | GuessNaiveRadius (ccGenericPointCloud *cloud) |
| Tries to guess a very naive 'local radius' for octree-based computation. More... | |
| static PointCoordinateType | GuessBestRadius (ccGenericPointCloud *cloud, const BestRadiusParams ¶ms, CCCoreLib::DgmOctree *cloudOctree=nullptr, CCCoreLib::GenericProgressCallback *progressCb=nullptr) |
| Tries to guess the best 'local radius' for octree-based computation. More... | |
| static PointCoordinateType | GuessBestRadiusAutoComputeOctree (ccGenericPointCloud *cloud, const BestRadiusParams ¶ms, QWidget *parentWidget=nullptr) |
| Tries to guess the best 'local radius' for octree-based computation (auto-computes the octree if necessary) More... | |
Protected Attributes | |
| ccGenericPointCloud * | m_theAssociatedCloudAsGPC |
| Associated cloud (as a ccGenericPointCloud) | |
| int | m_displayedLevel |
| Displayed level. | |
| DisplayMode | m_displayMode |
| Display mode. | |
| GLuint | m_glListID |
| OpenGL display list. | |
| bool | m_glListIsDeprecated |
| Whether the display (list) should be refreshed or not. | |
| ccOctreeFrustumIntersector * | m_frustumIntersector |
| For frustum intersection. | |
Octree structure.
Extends the CCCoreLib::DgmOctree class.
|
explicit |
Default constructor.
| cloud | a point cloud |
|
static |
Tries to guess the best 'local radius' for octree-based computation.
The ideal radius is determined by randomly sampling up to 200 points and looking at their neighborhood.
| cloud | point cloud on which to process the normals. |
| params | parameters |
| cloudOctree | input cloud octree (optional) |
| progressCb | progress notification (optional) |
|
static |
Tries to guess the best 'local radius' for octree-based computation (auto-computes the octree if necessary)
The ideal radius is determined by randomly sampling up to 200 points and looking at their neighborhood.
| cloud | point cloud on which to process the normals. |
| params | parameters |
| parentWidget | parent widget (for the progress dialog, if any has to be shown) |
|
static |
Tries to guess a very naive 'local radius' for octree-based computation.
| cloud | point cloud on which to process the normals. |
| void ccOctree::multiplyBoundingBox | ( | const PointCoordinateType | multFactor | ) |
Multiplies the bounding-box of the octree.
If the cloud coordinates are simply multiplied by the same factor, there is no use in recomputing the octree structure. It's sufficient to update its bounding-box.
| multFactor | multiplication factor |
| void ccOctree::translateBoundingBox | ( | const CCVector3 & | T | ) |
Translates the bounding-box of the octree.
If the cloud has been simply translated, there is no use to recompute the octree structure. It's sufficient to update its bounding-box.
| T | translation vector |